|
LX200GPS-25に赤道儀ウェッジを追加(2005.1.15) 眼視による天体の観望では、LX200標準構成の経緯台モードで十分です。経緯台モードではマウント内臓のマイコンにより、高度と方位角の2軸制御で日周運動をシミュレートし、導入されている天体を視野中心にずっと留めておくことが出来ます。ただし、経緯台モードによる追尾では、視野回転を伴うため、長時間露光による写真撮影では視野周辺部の星像が流れてしまいます。そこで、視野全体の星像を固定するために、視野回転を打ち消すデローテータか赤道儀方式のマウントが必要になります。LX200では両方の選択が可能ですが、私は後者を選択しました。デローテータについては、以下の不安があったのが赤道儀マウントを選択した主な理由です。
①長時間露光ではマウント駆動部の機械精度に起因して生じる追尾エラーがマウント部の2軸に加えて、デローテータによるエラーも加わってしまう。
②リアセルポートには、大きな光路長をとるマイクロフォーカサーが既に取り付けられており、デローテータを併用すると光路長が長くなりすぎ、その後に取付を予定している各種撮影機材の合焦に不安がある。
そこで今回は、三脚とフォークマウントの間に入れてLX200の赤道儀モードでの使用を可能にする赤道儀ウェッジ=Meade スーパーウェッジを追加しました。赤道儀モードでは、フォークマウント部の2つの自由軸のうち、経緯台モードの方位軸を地球の自転軸と平行に配置することにより、1軸制御での天体追尾ができるようになります。また、このようなコーディネーションでは視野回転を生じませんし、1軸制御での天体追尾が可能となるため、機械精度に起因する追尾エラーの補正も1軸分のみで済むのも大きなメリットです。ただし、方位軸と地球の自転軸を合わせる極軸合わせの精度が直接追尾精度支配するため、いかに極軸だしを正確を行うかが、キーになります。 □セッティング まずは三脚のセッティングです。私の場合は赤道儀ウェッジは前もって三脚の上に固定しておいて、ウェッジごと持ち運びしています。三脚の設置では、3つの足の開きを制限するテンションバーがあるため、ここに無理な力(ねじれ)が生じないように、3本の足を均等に少しずつ開いていくのがコツです。赤道儀ウェッジについている水準器を使って、大雑把に水平を出しておきます。これは、基本的に三脚の開き具合で調整しますが、設置する地面に傾斜や凹凸がある場合は三脚の長さも調整します。ウェッジに本体を載せると、三脚の沈み込みなどで水平がずれるので、この段階では水平だしは厳密である必要はありません。
そこそこ水平になっていて、かつ、均等に三脚の開き具合が調整されていると、三脚スプレッダと3本の足の間隔が大体均等になっているはずです。この状態でテンションノブを締めて、赤道儀ウェッジと三脚を固定します。このときはあまりぎちぎちには締めないようにします。
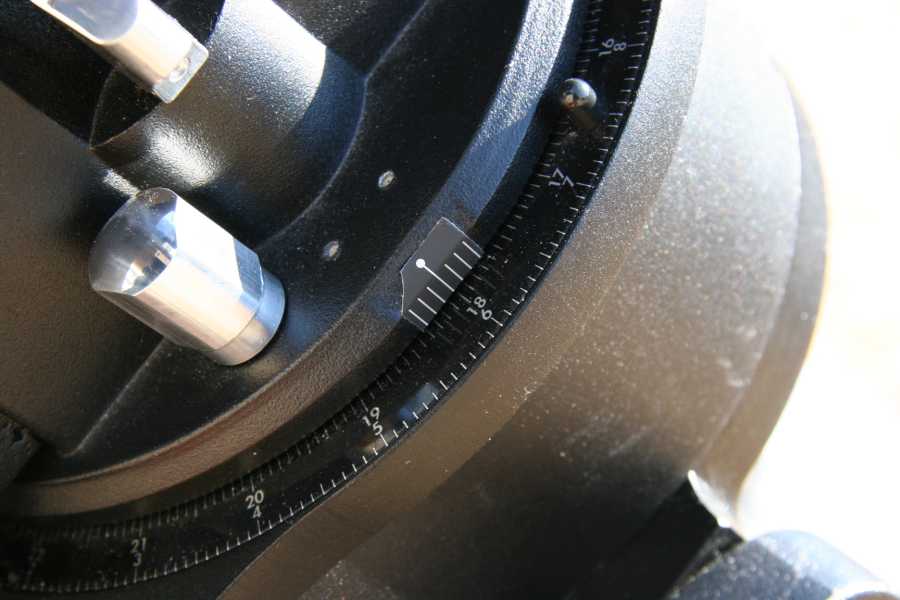
ウェッジの方位角の調整ノブをまわして、おおよそ中心位置にあわせておきます。3本の固定ボルトも締め付けますが、これもきつくは締めないで、方位角調整ノブでウェッジが回転できることを確認しておきます。ウェッジ上面の固定ノブについている方位磁針を使って三脚を持ち上げて向きを北に合わせておきます。本体を架台してからでは重たいので、ここでやっておきましょう。
方位磁針は真北と磁北の相対角(磁気偏角)を変えることができるように、目盛り環が回せます。前もってあわせておくと良いでしょう。私の住んでいる市原市の磁北は真北を基準として6.5°西です。
任意ロケーションの偏角はこちらを参照してください。
・国土地理院測地部(http://vldb.gsi.go.jp/sokuchi/) 磁気偏角が記載された日本地図(pdf)と任意緯度・経度による計算 ⇒磁針方位(磁気偏角)を求める(http://vldb.gsi.go.jp/sokuchi/geomag/calcu_declination.html)
・NOAA's National Geophysical Data Center (http://www.ngdc.noaa.gov/ngdc.html) 任意緯度・経度による計算(ポイント) ⇒Estimated Value of Magnetic Declination(http://www.ngdc.noaa.gov/seg/geomag/jsp/Declination.jsp) 任意緯度・経度範囲、ステップによる計算(グリッド) ⇒Estimated Values of Magnetic Field Properties(http://www.ngdc.noaa.gov/seg/geomag/jsp/IGRFGrid.jsp)
特に後者のサイトは、衛星観測データなど地球に関するさまざまなデータにアクセスできる学術的価値の高いサイトです。 是非覗いてみてください。
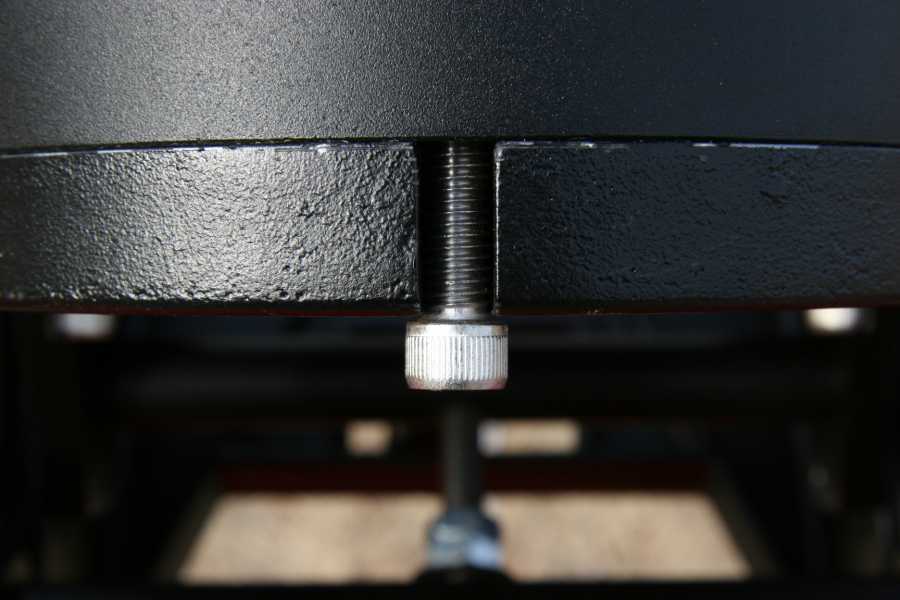
フォークマウント本体とウェッジの固定は3本のボルトで行いますが、ウェッジのチルトプレートに載せる前に、本体にボルトを1本だけ途中までネジこんでおきます(3回転程度です)。
この状態で本体を持ち上げて、ウェッジのプレートの切れ込みにボルトがはまるようにゆっくりスライドさせながら本体を引っ掛けますが、切れ込みがある高いところまで本体を持ち上げたとき、わき腹の筋肉を痛めてしまいました。 安全に作業する方法がないものかと、さがしていましたら、以下のサイトで脚立を補助に使う方法が紹介されていたので試してみました。 これなら私にもいけそうです。
・浦島太郎の天体観測(http://calando.no-ip.com/urashima/)
使用した脚立はスチール製で重さ7kg、一番上の踏み板の上にウェッジを持たれかけさせますが、踏み板までは大体75cmくらいの高さがあります。本体の鏡筒部分を自分の身体に持たれかけさせるように若干手前に傾けながら、フォークについたアームを使って本体を持ち上げます。本体に前もってねじ込んであるボルトをプレートの切れ込みに引っ掛けますが、本体をプレートに引っ掛けたあとも、本体を支えながら作業します。ボルトとアーレンキ-は前もって、手の届くところに用意しておきましょう。プレートと本体の位置を合わせた後、残りの2本のボルトをねじ込み、アーレンキーでしっかり締めます。そして、最後にプレートの切れ込み側のボルトを締め付けます。最後に本体をゆっくり起こせばOKです。
若干水平がずれているはずなので、三脚の脚の長さの調整のみで水平出しをしておきます。 一応、別の水準器で各部の水平を確認して見ましたが、ウェッジの水準器はほぼ正しい水平を示しているようです。
以上で、基本的な組上げは終わりです。
□マウントの安定性の確認
マウントの安定性の検証をしました。このためには適当な地上物を使います。今回は遠方に見えるアンテナを使うことにします。マウントは電源を投入し、適当にアライメントを終えておきます。setup⇒targets⇒terrestrial(地上)を選択しておきます。terrestrialを選択することで、日周運動に対する追尾を殺すことができます。 以下の手順でデータを記録しました。
①十字キーを使って、基準とする地上物を視野に導入します。今回はLV9mmアイピースを用いて、アンテナの先端を視野中心に合わせます。 ②MODEキーを長押し(2秒以上)し、上下キーおしてAltとAzを表示させ、メモします。RAとDecは日周運度を反映して刻々と変化するので、今回の実験には使うことができません。 ③反対方向に一度鏡筒を向けます。手動でも良いのですが、ここではだいたい反対方向にある恒星を選んで、GOTOボタンで自動導入します。昼間なので見えませんが、要するに、大きめに方向を振っておくことが目的です。 ④上下左右キーを使って、もう一度地上物を視野中心に導入します。AltとAzを表示させると、②で表示させたときの値と若干ずれているはずです。
このようなプロセスを何回か繰り返して行うと、大体のマウントの揺らぎを大雑把に把握することができます。たとえば、極軸導入がそこそこできていると思っても、実際に天体を導入したときには極軸がずれるといったことが生じえますが、このエラーの程度を把握することが目的です。
Table 1 標準構成
Table 2 サブスコープを架台
Figure 1 マウントの揺らぎ
標準構成の場合と、サブスコープ・鏡筒バランスウェイトを架台した場合について上記手順を6回ほど繰り返し、高度、方位角の2つの値についてプロットしました。何れの場合も最初少し大き目の変動が見えます。その後、揺らぎは1分程度の範囲でばらつきます。 初期の大きな揺らぎから、マウントのたわみのほか、三脚の地面への沈み込みが大きく影響しているように見えます。 いずれにしても、極軸を正確に合わせたとしても、マウント部や設置場所に絡んで30秒~1分くらいの揺らぎを伴うことを認識しておく必要があります。
宿題: ①設置場所を変えるとどうなるか たとえばアスファルトの地面などでは、揺らぎはマウント部のたわみのみに支配されるので、改善するはずです。 ②揺らぎがガイド性能に与える影響 幾何学的な問題を解くだけですが、写真撮影を行う視野角において、星像を点とするためにはどの程度の揺らぎに押さえなければならないかを見積もっておく必要があります。
Copyright (c) 2004 -2005Mujimuji All Rights Reserved. |